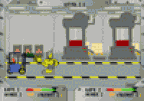
Los robots deben continuar con su avance sobre las maquinas de ruedas, pero no lo hacen al estar el camino cortado, asi que toma los objetos y acomoda para que al dar click los robots avancen sin problemas.